Детектирование R-зубца.
Однако существенным недостатком данного алгоритма является большой объем вычислений, необходимых для его реализации, что приводит к увеличению времени анализа ЭКС большой длительности. Кроме того на конечный результат влияет выбор той или иной функции сравнения, поскольку она определяет конечный вид функции КК. В [3] в качестве функции сравнения предлагается использовать отрезок исходного сигнала содержащий один QRS-комплекс. Такой подход, несомненно, даст максимально близкие к единице значения КК в районе QRS комплекса. Однако у этого подхода есть и свои минусы. Каждый раз перед началом анализа новой ЭКГ необходимо выделять область сигнала, принимаемую за эталонную. По этой причине результаты одного вычисления КК могут не совпадать с результатами другого вследствие того, что функции сравнения были не идентичны. Кроме того, полученная функция КК в этом случае будет несколько сдвигаться относительно исходного сигнала в зависимости от характеристик функции сравнения, что требует введения компенсационного сдвига.
Для устранения указанных недостатков, неопределенности и неоднозначности решений, предлагается в качестве функции сравнения вместо отрезка исходного сигнала использовать фиксированную функцию. Результаты вычисления КК в этом случае обладают воспроизводимостью и достоверностью, а используя математическое описание функции сравнения можно точно вычислить компенсационный сдвиг.
В качестве функции сравнения может быть взята любая функция, внешне похожая на QRS комплекс. В процессе исследований было показано, что лучшие результаты при вычислении КК достигаются при использовании функции сравнения вида:
![]() , (4)
, (4)
где ![]() масштабирующая функция.
масштабирующая функция.
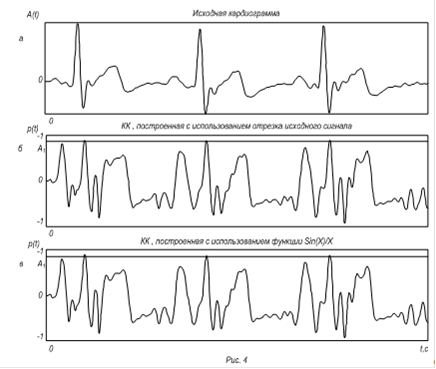
Как видно из рис. 4, функции КК при использовании в качестве функции сравнения отрезка исходного сигнала и функции ![]() , вычисленной по формуле (4), практически идентичны. Это говорит о том, что использование функции (4) вместо отрезка искомой ЭКС не уменьшает надежности системы.
, вычисленной по формуле (4), практически идентичны. Это говорит о том, что использование функции (4) вместо отрезка искомой ЭКС не уменьшает надежности системы.
Как видно из рис. 3 и рис. 4 зубцы P и Т на функции КК также дают большие всплески, которые могут быть сопоставимы по амплитуде с значением КК в моменты появления R-зубца. При некоторых видах патологий и помех детектирование R-зубца непосредственно по взаимнокорреляционной функции может оказаться просто невозможным, поскольку сопряжено с риском обнаружения зубца P или T вместо интересующего нас R-зубца. Для того чтобы избавиться от этих недостатков авторами предложено использовать КК не для детектирования R-зубцов на ЭКС, а для избирательной фильтрации исходного сигнала.
Перемножим каждое значение исходного сигнала на соответствующее данному моменту времени значение КК ![]() . Учитывая, что
. Учитывая, что ![]() нормирована к единице, на участках где его значения близки к единице (R-зубец, иногда Р и Т зубцы), результат этой операции существенно ослабит выбросы на участках близких к указанным зубцам. На остальных участках результат будет представлять собой подавленный, в соответствии, со значениями КК в соответствующие моменты времени, исходный сигнал (рис. 5) .
нормирована к единице, на участках где его значения близки к единице (R-зубец, иногда Р и Т зубцы), результат этой операции существенно ослабит выбросы на участках близких к указанным зубцам. На остальных участках результат будет представлять собой подавленный, в соответствии, со значениями КК в соответствующие моменты времени, исходный сигнал (рис. 5) .

После такой избирательной фильтрации получим функцию, содержащую подавленные Р и Т-зубцы, и значительно превосходящий их по амплитуде R-зубец. Остальные составляющие ЭКС будут подавлены. Пропустив полученный сигнал через описанный ранее амплитудный пороговый детектор можно точно определить временное положения R-зубцов на протяженном кардиосигнале. Такой подход позволяет существенно снизить вероятность ложных срабатываний алгоритма, тем самым увеличив его надежность, однако это значительно увеличивает объем вычислений, необходимых для его реализации.